Alright, let’s get this show on the high road.
I am currently working on a high-performance, top-tier racing spec remote control design that uses modular internal components that can easily be reconfigured into different shapes/styles/sizes. I feel the remote and control over your throttle is one of the most important aspects of riding, and while there are some great low cost open source options out there I’d like to do something a bit different.
I’ll rip this band-aid off now to properly set expectations- These are going to be expensive as they will be hand-built and I’m not cutting corners on component choices. I am having a few discussions about designing a more affordable, less frills version that would be more in line with traditional remote features while not cutting performance/quality, just a few less bells and whistles (like no LCD, no haptic, etc), but this will come later.
I will be releasing the entire project open source under a Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0) license. This will be a fully open source project: firmware, web server/app code, ECAD design files, Electrical schematics, and 3d models of the grip case so you guys can tweak and tune to your hearts desire. Free for commercial use.
The only caveat being is that I don’t yet have permission from the OEM of the thumbwheel sensor to put them on blast, and they aren’t really setup to sell to individuals, it’s a B2B OEM. I will ensure we have other options here though that are more easily sourced so I’m not the sole supplier for thumb wheels, however replacements/alternates will be made available at cost + a small charge to handle tooling investments (like +$5 each at most)
However- the design can accommodate different analog sensor inputs for the throttle. They also have MOQs on the custom versions I’ve spec’d that make them fairly inaccessible to most. As you can imagine at $70-80 a piece it adds up quick.
I’ve not had as much time as I’d like to work on this over the last 2 months, but I’ve got revA PCBs waiting for me back home and 2 weeks off, so I intend on seriously digging into making prototypes. The biggest thing I’m waiting on is a batch of thumbwheels from the manufacturer.
So with that said, here are the specs and proposed development road map.
Phase 1 - Remote Reference Design & Basic Receiver
- Throttle Sensor - military-spec (literally from a DOD contracted flight controls manufacturer) high-precision hall-effect thumbwheel sensor, impact resistant, IP-67. Amazing hand-feel, customization options for different trigger/thumbsticks & spring resistance. I’ll ping @SeanHacker or @Skunk to chime in with feedback as they’ve held my prototype in hand. The biggest catch here is the modular thumbwheel unit alone is pretty expensive @ $70-80 depending on configuration.

- Modular Internal Electronics - Currently my PCB design is roughly the shape/layout of an 18650 cell, with two analog inputs for the option of a 2nd throttle/thumbwheel if you’re feeling saucy. Analog inputs from the hall effect throttle sensors are interfaced via a 12-bit ADC. I am actually using an 18650 cell for power currently, with an integrated li-ion charger/boost circuit, but I’d like to leave this somewhat flexible in the design. Buttons will probably be kept minimal but I would like basic mode switching and aux channel control.

-
Radio Comms Link - 802.15.4 Xbee3 Radio Modules. I’ve used the Xbee S2C & 3 in a variety of environments professionally, they’re essentially built for high-interference industrial environments. All the bells & whistles you’d expect from a modern, higher end radio comms module. Currently for testing, I’ve simply created a 115k-250k baudrate transparent UART link from the VESC to the remote using a pair of modules. I must emphasize that this is still very early in testing, I am not set on using these if they don’t hold up in real-world performance. The biggest concern with transporting any more complex data structure like this is latency, though based on early testing I’m seeing around 30-35ms round trip time @ 115200 baud, without optimizations. Again, as critical as the comms link is this will still need a lot more testing, I just have a lot of experience using these modules so they’re an easy go-to to get up and running quickly. So far they are working really well, but it needs to be thoroughly tested before I’ll give it a bulletproof stamp.
-
0.9" Color LCD Display/Integrated ESP8266EX SoC/WiFi/SD Card - Currently prototyping with a 4D Systems IOD-09 module. I intend on keeping the display clean, simple, graphical. Currently I have it displaying speed, board battery, remote battery, odo. Obviously additional info can be added on other screens, etc. Just not a huge priority right now until other bring-up is done.

-
Receiver - Currently the plan is for a very basic receiver module that just interfaces directly to UART, but keeps costs down to about $25 per receiver for multi-board support. I have the ability to add PPM/PWM, but it’s lower on my list of priorities and may end up getting included in the Advanced Receiver project.
-
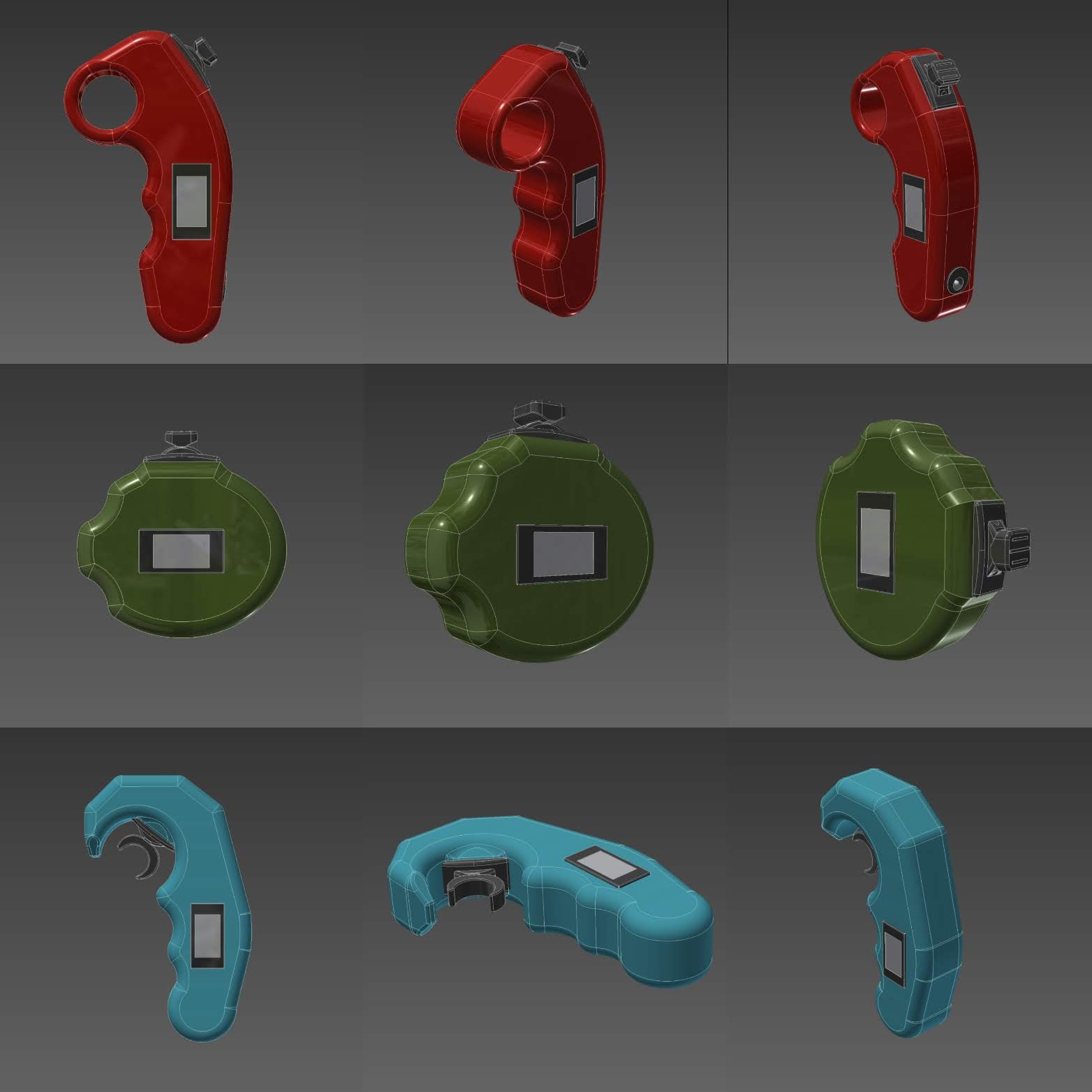
Remote Grip/Enclosure Design Styles - ‘Nano Style’, ‘Puck Style’ & ‘Trigger Style’ are the three I chose to start with. The intent here is to allow for people to modify and/or design their own enclosures, but I wanted to make a few basic reference designs available to get people started or to offer to those that don’t have modeling/printing abilities. These are intended to be solid-piece prints with access panels for the battery/LCD on the rear and a robust charging port (how many of you have broken a microUSB port off?). Here are a few first-pass sketches as reference. Please note- I am aware I will need to shift the LCD around, these are nowhere near final and will require a good number of print iterations to get the sizing & handfeel correct. Purely for example, but I am printing up a shelled dummy of the red ‘Nano Style’ in Nylon 910 currently to get started.
PS: I promise I actually made a consious effort to make them look less like Dongs. Late nights tho
Phase 2 - Onboard telemetry logging to SD card/WiFi API for App sync
This will be the second stage of development after basic functionally is rock solid on the remote. Concept here is that the board/remote should always be logging internally and shouldn’t depend upon a Bluetooth tether to your phone. I already have the ESP2866 setup to host a webpage on demand for configuration/tuning, this will be extended as a web API that can be turned on as needed to ’Sync’ your remote to a logging app not dissimilar from how a FitBit style fitness tracker logs/syncs up. I would like for the board & remote to be self contained and not require a phone to be on-hand and connected in order to log ride metrics. SD card onboard the esp board gives us plenty of space for logs.
Phase 3 - Advanced Receiver
This will not replace the basic receiver, rather be an advanced option further down the line. Features will include dual PPM/PWM outputs to give additional throttle output options to the ESC or for compatibility with non-VESC based ESC. UART will still be required for full telemetry obviously. Also want to add a bank of 12v mosfets to control lights, horn, etc.
Open to suggestions on additional features you guys would like to see here. I’m designing and releasing this project as a thank you and contribution back to the community for all the help you guys offer to everyone. I’d like you to be involved in the design process so we get a solid baseline to iterate from.
Beta Signup List:
PS: can we get an ESK8 Electronics category?


