I can’t unsee Tucker without a beard now…
5 Likes
My theory is in shambles, the kaly deck actually felt good. Damn.
The more I learn the less I know
3 Likes
did you mean reduced chatter? ie increased dampening.
Ah! Yes. Thanks.
I tried a science.
I clamped each deck to my lofted bed, and an accelerometer onto the end.

then gave them each three highly scientific calibrated thwacks
Some Matlab code later, graphs!
Raw data, the measured accelerations (single axis, ~18 kHz)
halfway through writing this post, I went back and improved my data recording scripts (primarily accelerometer filtering settings) to increase it from ~1kHz ![]()

Thwack at t=0s, then the acceleration decreases as energy dissipates.
- High-frequency vibration that quickly gets attenuated in <0.2 seconds
- Low-frequency vibration “primary” frequency is very repeatable
Zooming in, they have secondary frequencies that persist after the initial thwack… especially the warren deck!

A FFT (Fast Fourier Transform) shows the signals in the “frequency domain”, basically showing us where the deck likes to resonate.
I did this over the first second after the initial whack to capture the high frequency vibrations. I’m not putting importance on the specific frequencies, as I expect that’s mostly a function of deck stiffness and sprung mass. Instead, I’m paying attention to how the decks compare to each other, and if some decks handle vibrational frequencies differently

The afterburner was the least good feeling deck, by far. So the conclusion might be we want these secondary modes of vibration?? idk, doesn’t make sense to me.
6 Likes
Wrote some code that analyzes the ringdown of the deck, calculating the difference between each successive peak of vibration, then taking the natural log.


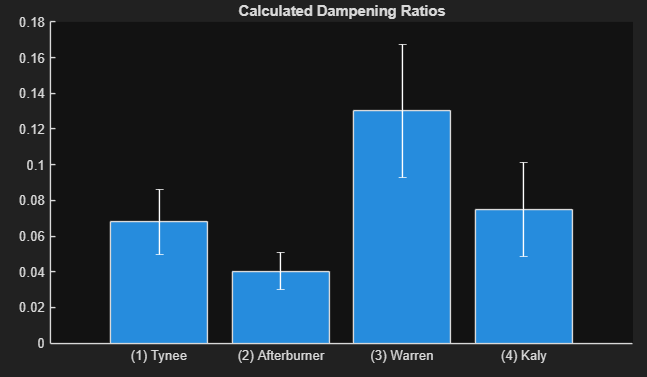
This is what came out the other end of 120+ dampening calculations.
This graph lines up precisely with my subjective, qualitative experience on the track. In other words, I’ve found a positive correlation between deck dampening and track feel
Fuck yeah.
If you’re curious, the error bars are the standard deviation of calculated dampened ratios
11 Likes

Very nice!! What type of filter did you use for imu? Lowpass? How many hz? I am working on a traction control algorithm for vesc based on imu . But you have all these kalman filters and low pass filters and fusion and interpolation. I have gone crazy ![]()
1 Like
This data has no filtering or anything. Pretty much what I changed for the second batch of data was the filtering settings onboard the IMU that I was using. It’s default settings were decent for average use, but wasnt as responsive as id like >1kHz.
Excited to see what you come up with! Entirely IMU is going to be difficult, lots of edge cases to consider (hills, bumps, weight shifts, surface, etc)
3 Likes
Is there any chance you could borrow someone’s radium mach one and set this test up on it? I am really interested how the damping ratio of the bushing based suspension would compare
If anyone’s willing me to lend me a deck for an afternoon, I can definitely do this testing on it.
Not aware off the top of my head of anyone in LA/SD that has a Mach One
1 Like