What did you do to get it working properly?
1 Like
I’m 100% sure I have it wired correctly because I tested with a multimeter and saw 5V on each hall wire.
^have you done this?
The motor detection doesn’t work for me but that is due to the inductive weirdness of the V1 hub…
So you are getting all 3 hall signals but it still says they are misaligned?
1 Like
Yes, I do have full sensor voltage, but only @5V. 3.3V doesn’t work for me !
1 Like
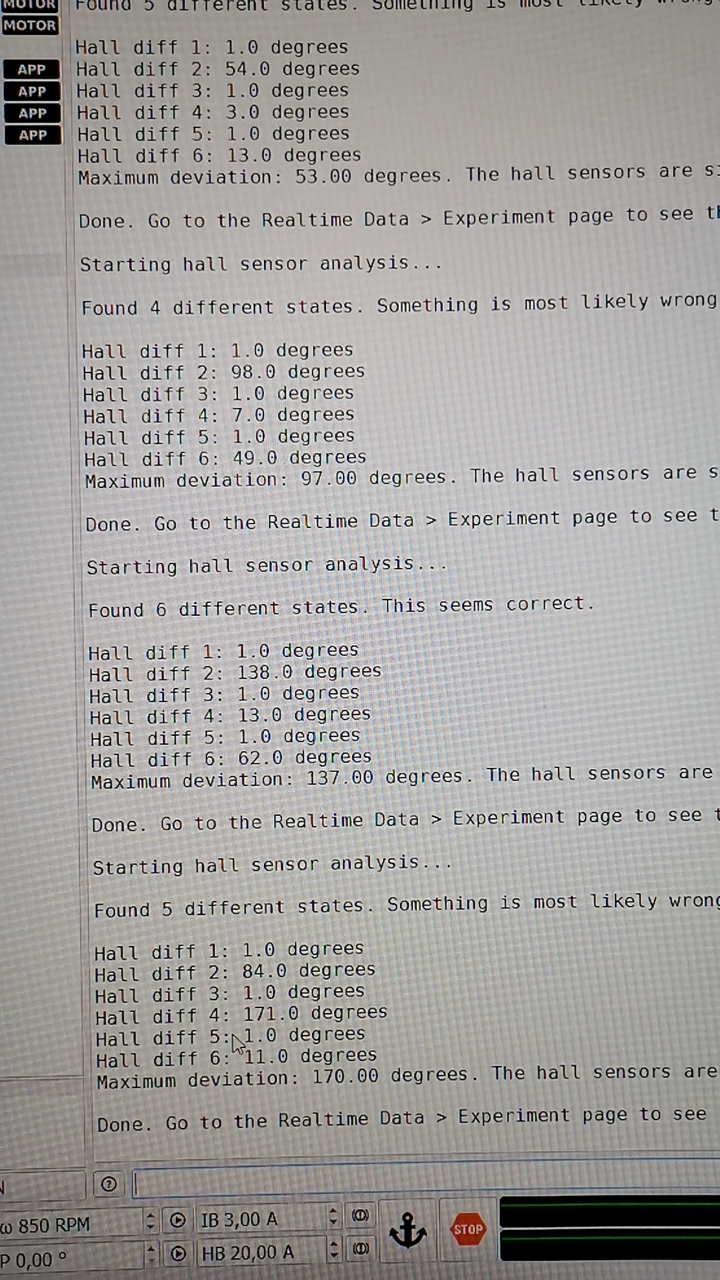
somehow I always get those 1° value
1 Like
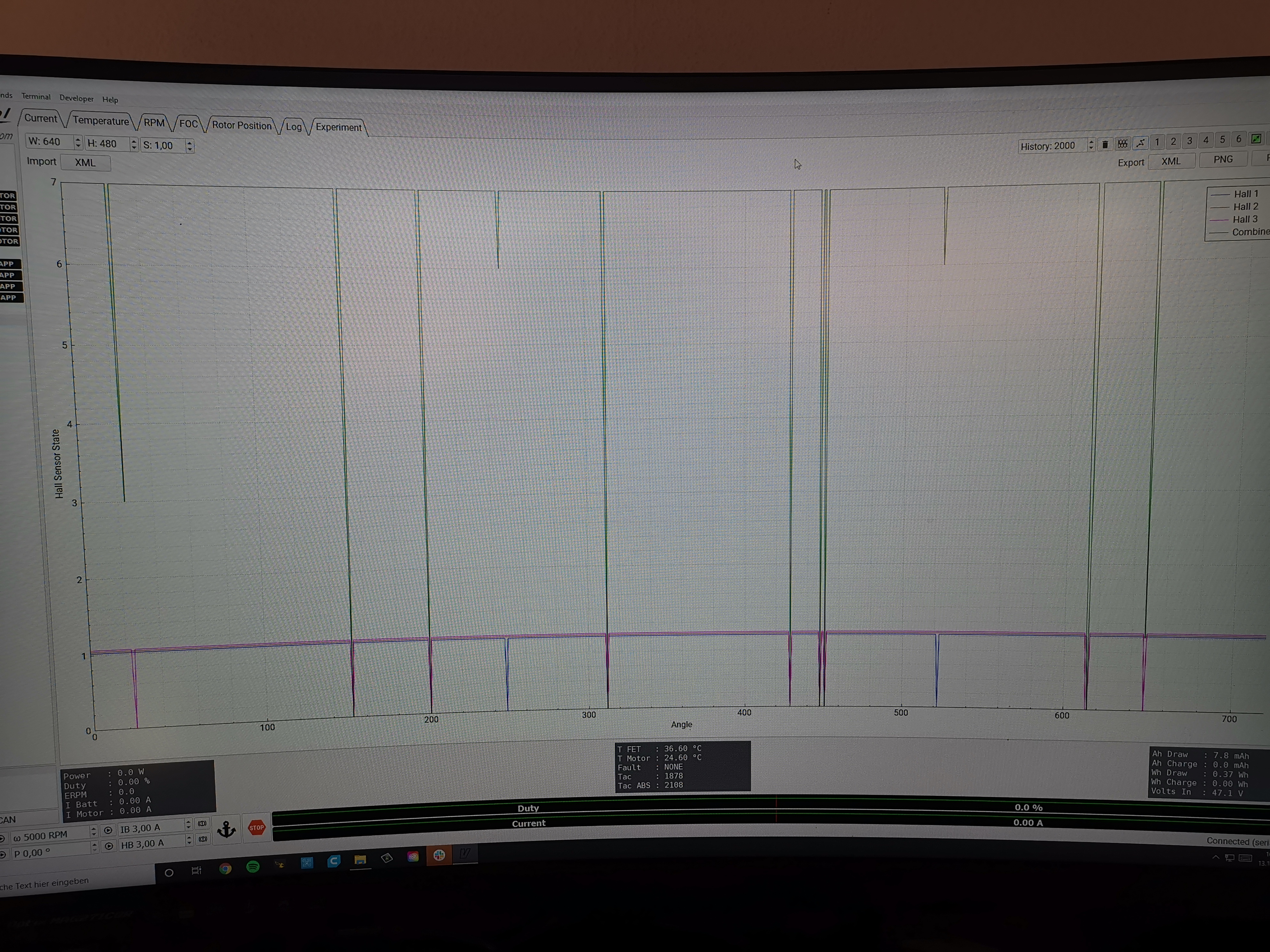
Did you look at the graph?
Would help you answer this question.
1 Like
I somehow can’t get it to work.
Can you please explain what I should do?
I’m in Realtimedata-> Experiment
I made sure that the RT button is on + motor is spinning
There is no graph 
1 Like
Hmm there should be colored lines, please post what your screen looks like.
1 Like
I’ll check tomorrow. Thanks for all your help so far 
1 Like
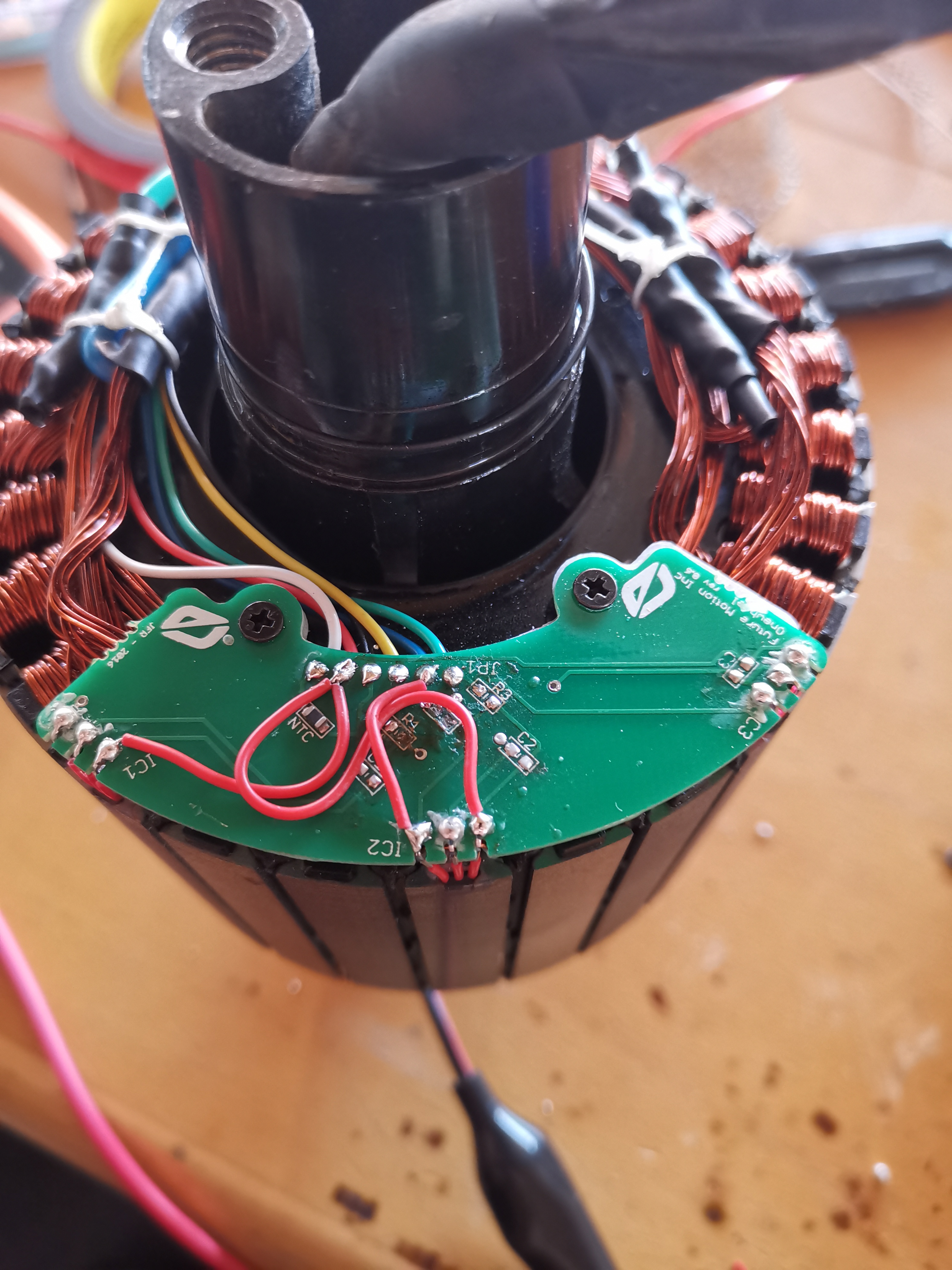
It’s working now!
I simply did bypass the resistors and caps on the hall pcb!
2 Likes



{kind=link}
{kind=link}
{kind=link}
I hit over 30mph stock before nosediving, you know how the story continues.