Sometimes redoing motor calibration if you’ve adjusted any wires or connections can help to reduce the cogging but otherwise like Brian said sensors will eliminate it and can run “hybrid” mode where sensors are used below some erpm since the back EMF is good enough at speed and the hall sensors could be worse, but at low rpm the sensors can basically eliminate any cogging which is nice (particularly on the pneumatic build)
2 Likes
You not only need TX and Rx, but also a common ground for the devices to communicate.
TX --------------- RX
RX --------------- TX
GROUND ------ GROUND
Also, try 9600 and 115200 bauds.
2 Likes
What about a pair of lower kv motors - 130/150kv? Or is it just the gear ratio that will makes a difference.
cool. I’ll read up on it some more tonight…interesting stuff.
Isnt the ground on the ppm enough?
This will help you understand what motor kv is specifically.
Motor gearing and kv work hand in hand to balance speed and torque… Changing one will affect both.
Generally speaking,
Low kv motors are better for torque
High kv motors are better for speed
1 Like
Tested today. The temp remained below 53c. I tested on full charge and cold run too but it just won’t climb the steepest hills like it used to. Funny thing is that I was able to zip up a hill that I’ve considered really steep (Hyde street at Fishermen’s Wharf) Oh well, it’s probably the battery showing its age.
1 Like
If it’s not temperature related, then you can also check the battery voltage under load - If it sags low enough to reach the low voltage cutoff, the vesc will reduce power as if the battery was dead.
1 Like
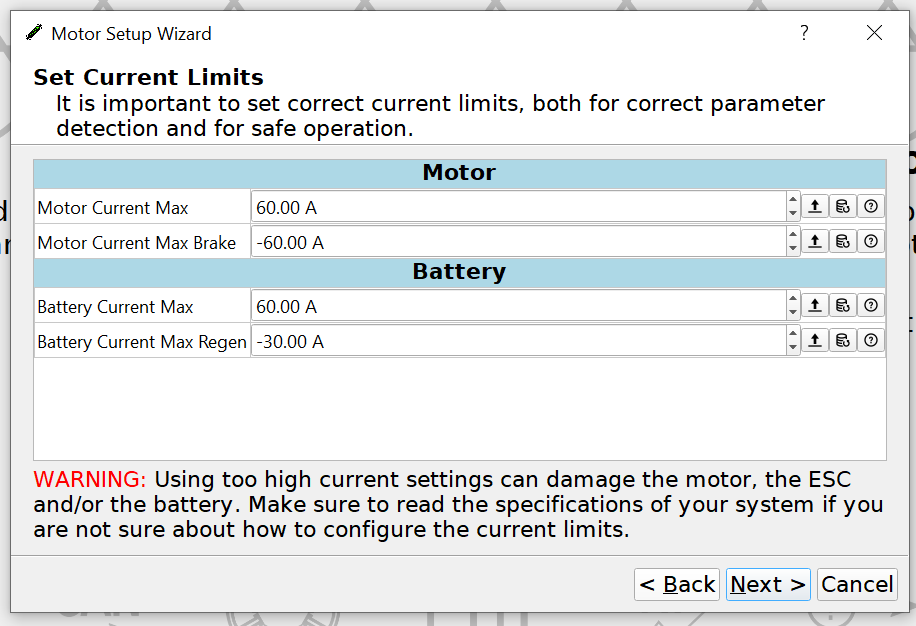
Does this regen seem ok, is there any risk that it would be able to overcharge the battery if I’m going down hill and breaking alot?
I ask as I checked voltage after a ride and before the ride it was 38v and after it’s 41v surprised at how much it recharged
The regen current “safe limit” is dependent on the battery pack you have. With those 5Ah Turnigy packs you’re using, the maximum allowable charge rate is 5C, which is five times the capacity. 5 times 5Ah is 25A, so that’s what I’d set your max. regen to.
When going down a long hill with a mostly full battery, if the battery reaches “full” due to regen, the vesc will stop putting more current into the battery to protect it. This has the unfortunate side effect of the board losing all brakes, as the braking energy has nowhere to go.
Moral of the story is, don’t go down hills with a full battery.
6 Likes
Thanks man will change that, very scary to lose brakes on the hills I am going down!
Agree there. I live on a hill, so I learned that the hard and scary way.
5 Likes
Bump…
Definitely not ideal since putting the heatsink right up against anything but a fan pushing air over it isn’t really ideal over the long term, the extra mass will act as a better heat sink initially but under load over time the heat will just build up with nowhere to go. Believe the vesc default settings have soft temp set to 85C for the PCB/MOSFETs and hard temp at 90C so the temp shouldn’t get higher than that so anything touching the heatsink just needs to deal with that or you’d need to adjust the temp settings to keep it cool enough but would be giving up hill climbing and/or working in warm ambient temperature.
Running the cells warm is actually good but hot is bad it’s a balancing act for the chemistry in the cells to optimally deliver the power stored in the battery (ask any Tesla owner in a cold climate)
Yeah that should be good. What about the baudrates?
I Havent tried yet. Will do it on the weekend
Is there a guide or tutorial on how to do conformal coating? I’m looking to conformal coat a motor sensor pcb.
1 Like
So, if I want to have a backup remote for my board, but don’t want to open the enclosure to re-bind every time I’d switch between the remotes, is it even possible?
I’m using a gt2b with an orange housing for better reliability.
some receivers and remotes will allow multiple transmitters/receivers to bind with them
I “think” gt2b has the capability, but you can try it of science and learn your remote for yourself…
take your second remote and go thru the bind process and see for yourself if it will allow multiple transmitters to bind with a single receiver
1 Like