I’m going to get egg-heady here. So if you do egg-heady, please read on. If you are interested in egg-heady, please read on. If egg-heady bores you, this will bore you senseless. Caveat emptor.
I commented on a thread here. https://forum.esk8.news/t/esk8-aerodynamics/3072/4?u=bourbon_norm
and I have been thinking about it a bit. I think if we we approach it with applying the losses associated with each system to that system we can improve on that start and write a generalized equation for the efficiency of an esk8 design based on the mass and the frontal area of the rider. It can probably be easily extended to apply to any PEV. Once the losses associated with the vehicle are all attached to the components, all that is left is the mass and drag of the rider.
I needed peer review to get to the thrust = drag result. I would need more here but I think the result could be a powerful tool for the community.
Thank you. One point of note this calculator gives results (gear ratio and speed) which are in theory most efficient at winning races, not most efficient in terms of miles per kilowatt hour.
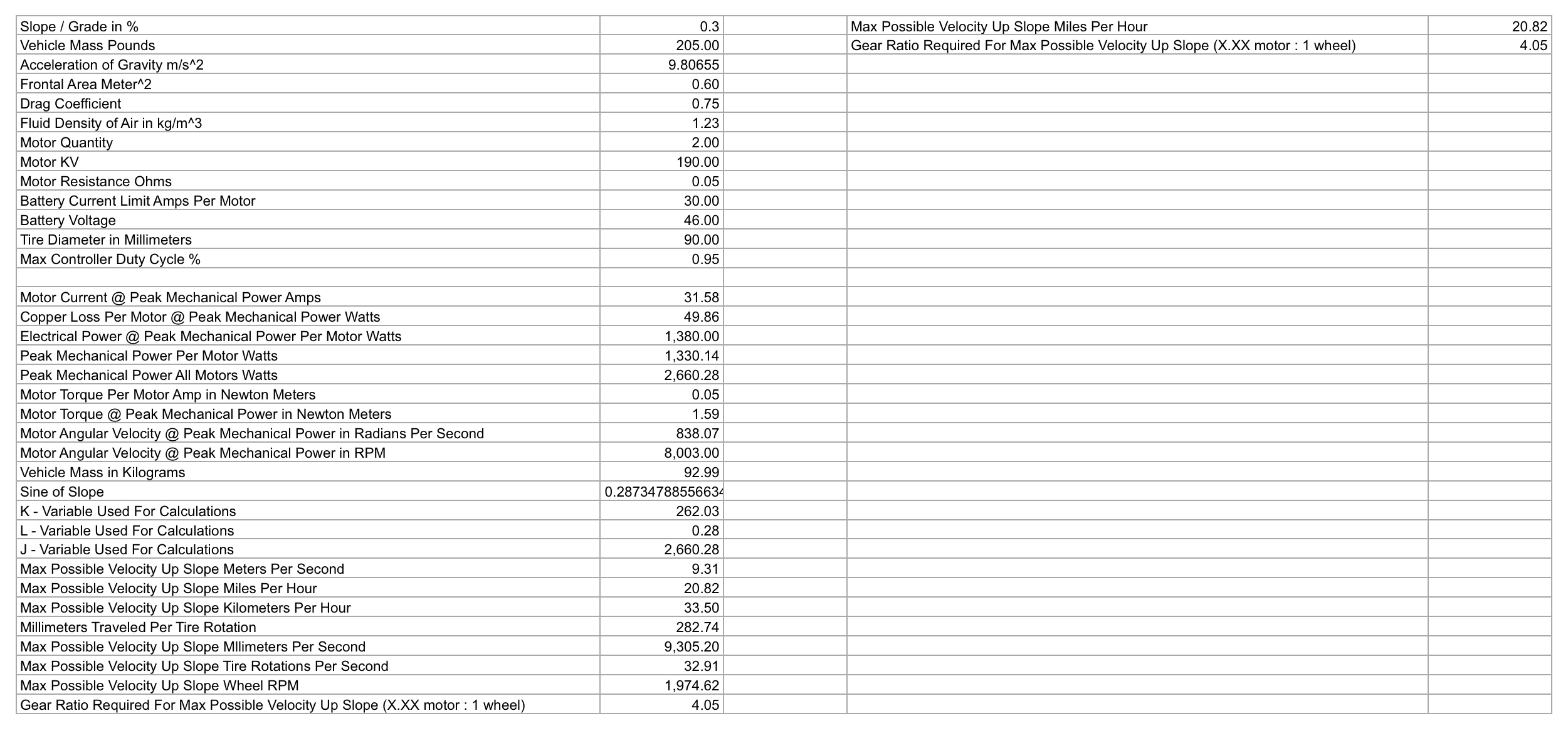
Although, to get an efficient vehicle using the calculator you can do a few things:
Optimize for a steep grade – 25% to 30% (0.25 - 0.3 in calc)
Use a lower electrical resistance motor (usually larger size)
Use the same amount of battery amps through more motors, for example if you currently use 30a battery amp limit per motor with 2 motors, 15a battery amp limit per motor with 4 motors is more efficient
Lower your battery current and motor current limits
Use higher battery voltage
Accelerate more slowly and maintain lower average speed
Just curious but why is this the case? Usually using 1 large motor is more efficient than using multiple smaller motors. Does this only work if all motors are larger? I’m guessing this doesn’t account for the added drag of extra drive belts
motor_torque_per_amp_kt = 60 / (2 * pi * motor_rpm_per_volt_kv)
^from the second equation, it can be seen to generate the same vehicle thrust at the same rpm with 4 motors or 2 motors, the 4 motors takes half the motor current per motor. from the first equation you can see half the motor current gives 1/4th the heating in watts per motor – but overall half the heating since there’s twice as many motors. This assumes identical construction between the 2 motors or 4 motors.
if you only use 2 bigger motors each with twice the copper and therefore half the resistance as another 2 motors but the same kv, you’ll get half the heating per motor for the same thrust, but the same total heating as 4 motors with the same construction as the smaller 2 motors.
 that’s the ticket.
that’s the ticket.