@b264 how about a “peak loaded velocity & gear ratio calculator” for those uphill races?
suppose i’ll be climbing 1.8miles on a steady 5% grade…
i have 4x 190kv 0.05ohm motors & 83mm tires, 120a motor current and 60a battery current limit per motor, & 13S (48.1v)
what’s my maximum top speed up slope and what gear ratio gives this top speed assuming 0.6m^2 frontal area, 0.75 drag coefficient & 200lbs?
assuming battery current limit is 95% or less than the motor current limit, and a vesc with max 95% duty cycle is used in BLDC mode:
60a battery limit / 95% duty = 63.1578a motor current at peak mechanical power
63.1578a^2 * 0.05ohm = 199.445385042w copper loss per motor at peak mechanical power
60a battery limit * 48.1v battery = 2886w electrical power at peak mechanical power per motor
2886w peak electrical - 199.445385042w copper loss = 2686.554614958w peak mechanical power per motor
2686.554614958w peak mechanical power per motor * 4 motors = 10746.218459832w peak mechanical
60 / (190kv * 2 * pi) = 0.05025945571323010603228Nm per motor amp
63.1578a * 0.05025945571323010603228Nm per motor amp = 3.174276652045044390766 Nm torque at peak mechanical power
2686.554614958w peak mechanical / 3.174276652045044390766 Nm = 846.3517548878964569933rad/sec @ peak mechanical
(60 / (2 * pi)) * 846.3517548878964569933rad/sec = 8082.063923094534641801 motor rpm @ peak mechanical power
^peak mechanical power is 10746.218459832w @ 8082.063923094534641801 motor rpm
A = meters per second = XX.XXX
B = drag coefficient = 0.75
C = frontal area = 0.6m^2
D = fluid density of air = 1.225kg/m^3
E = wind drag force in watts
F = sine of 5% slope = sin(atan(5/100)) = 0.04993761694389223373491
G = acceleration of gravity = 9.80655m/s^2
H = vehicle mass in kg = 90.7184kg = 200lb / 2.20462lb/kg
I = mechanical watts required for constant speed up slope with no wind drag
J = mechanical watts required for constant speed up slope including wind drag
K = H * G * F
L = (1/2) * D * C * B
E = ((1/2) * D * C * (A^2) * B) * A
I = H * G * A * F
J = E + I
J = (((1/2) * D * C *(A^2) * B) * A) + (H * G * A * F)
J = (1/2) * D * C * B * A^3 + H * G * F * A
J = (L * A^3) + (K * A)
^this can be rearranged to:
A=(sqrt(3) * sqrt(27 * J^2 * L^4 + 4 * K^3 * L^3) + 9 * J * L^2)^(1 / 3) / (2^(1 / 3) * 3^(2 / 3) * L) - ((2 / 3)^(1 / 3) * K) / (sqrt(3) * sqrt(27 * J^2 * L^4 + 4 * K^3 * L^3) + 9 * J * L^2)^(1 / 3)
we know:
J = 10746.218459832w peak mechanical
L = 0.275625 = (1/2) * D * C * B
K = 44.42622815547907982077 = H * G * F
therefore:
A=(sqrt(3) * sqrt(27 * 10746.218459832^2 * 0.275625^4 + 4 * 44.42622815547907982077^3 * 0.275625^3) + 9 * 10746.218459832 * 0.275625^2)^(1 / 3) / (2^(1 / 3) * 3^(2 / 3) * 0.275625) - ((2 / 3)^(1 / 3) * 44.42622815547907982077) / (sqrt(3) * sqrt(27 * 10746.218459832^2 * 0.275625^4 + 4 * 44.42622815547907982077^3 * 0.275625^3) + 9 * 10746.218459832 * 0.275625^2)^(1 / 3)
A=32.32551993764664323864 meters per second
^therefore the peak velocity up slope is 32.32551993764664323864 meters per second
72.31024856931928212624mph = 32.32551993764664323864 meters per second * 2.23694 mph per m/s
^72.31mph is the maximum possible top speed up 5% slope w/ 200lbs, 0.75 drag coefficient, 0.6m^2 frontal area, 4x 190kv 0.05ohm motors & 120a motor current limit & 60a battery current limit per motor w/ 48.1v battery
therefore we need:
8082.063923094534641801 motor rpm @ peak mechanical power @ 72.31024856931928212624mph w/ 83mm tires
83mm * pi = 260.7521902479528387924mm per rotation
1mph = 0.44704 meters per second
72.31024856931928212624mph * 0.44704 meters per second per mph = 32.32551993764664323864 meters per second
32.32551993764664323864 meters per second * 1000mm per meter = 32325.51993764664323864mm per second
32325.51993764664323864mm per second / 260.7521902479528387924mm per rotation = 123.9702719540260136714 tire rotations per second
123.9702719540260136714 tire rotations per second * 60 seconds per minute = 7438.216317241560820284 wheel rpm required for 72.31024856931928212624mph @ 83mm tire diameter
8082.063923094534641801 motor rpm / 7438.216317241560820284 wheel rpm = 1.086559408652925905457 gear ratio
^1.08:1 gear ratio is needed to obtain maximum possible 72.31mph top speed up 5% slope w/ 200lbs, 0.6m^2 frontal area, 0.75 drag coefficient, 4x 190kv 0.05ohm motors, 83mm tires, 120a motor current limit, 60a battery current limit per motor & 48.1v (13S) battery
answer:
72.31mph & 1.08:1 gear ratio
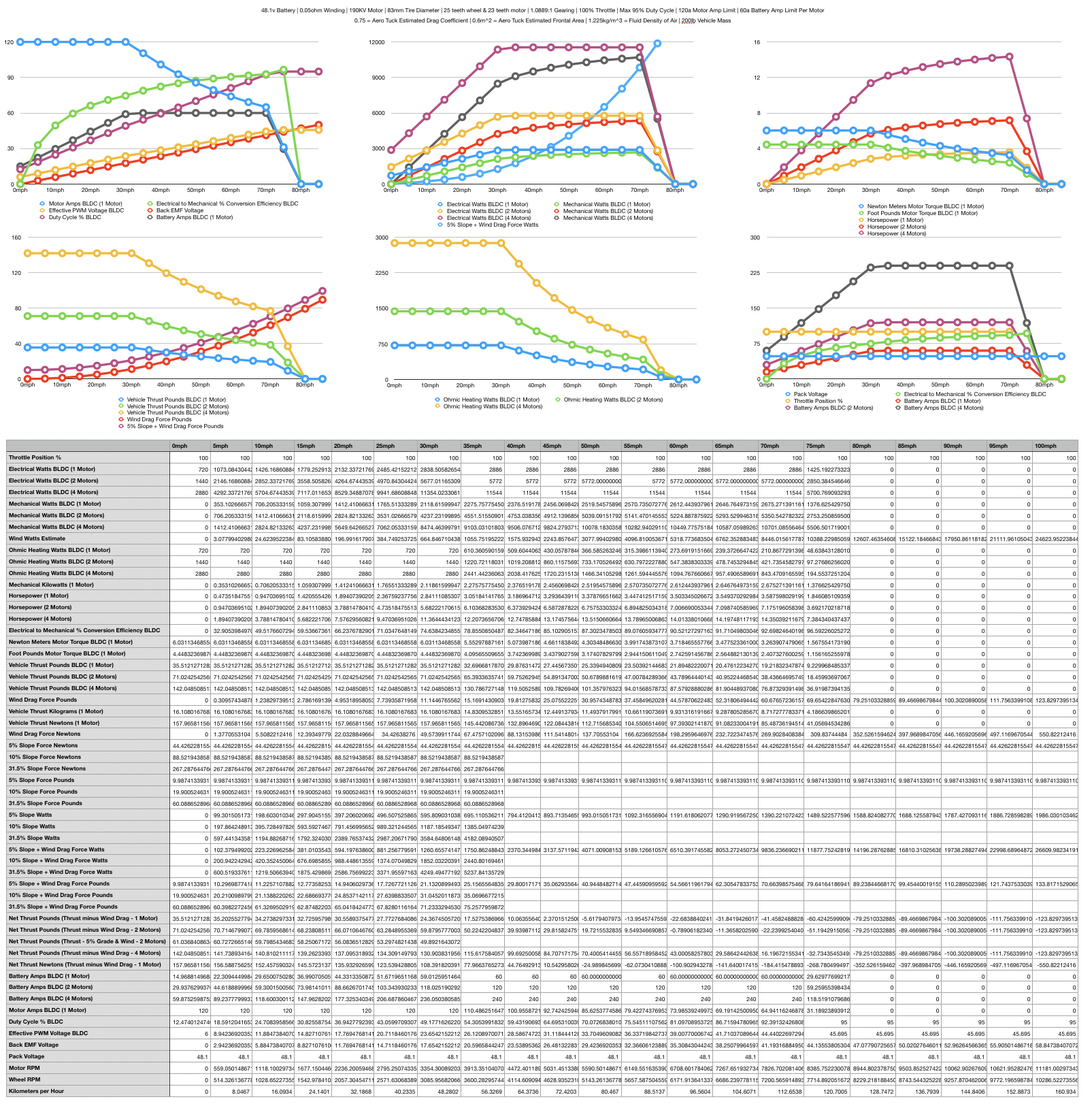
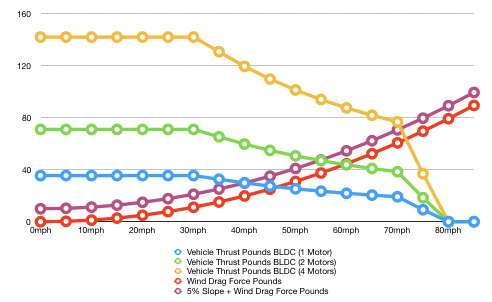
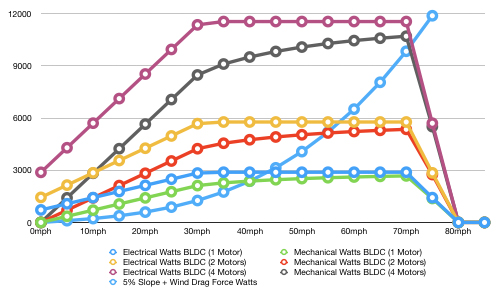
^graphed out it looks about like this 25T wheel & 23T motor = 1.088:1 ratio for ~72mph up 5% slope w/ 4x 190kv 0.05ohm, 83mm tires, 120a motor current and 60a battery current limit per motor, 13S (48.1v) w/ 200lbs, 0.6m^2 frontal area and 0.75drag coefficient.